다음으로는 그리퍼를 제작 or 구매를 해야한다. 우리가 설계한 로봇팔에 맞는 그리퍼를 찾는게 중요했다.
하지만 그전에 토크 계산을 대충대충 진행한 탓에 다시한번 제대로(?) 계산을 해볼 필요가 있었다.
이에 관련해서 도움을 받았는데 최대한 간소화해서 manipulator가 지면과 평행 하다는 가정을 하고
각 link에 걸리는 토크를 계산해 더 정확한 manipulator 설계를 진행했다.
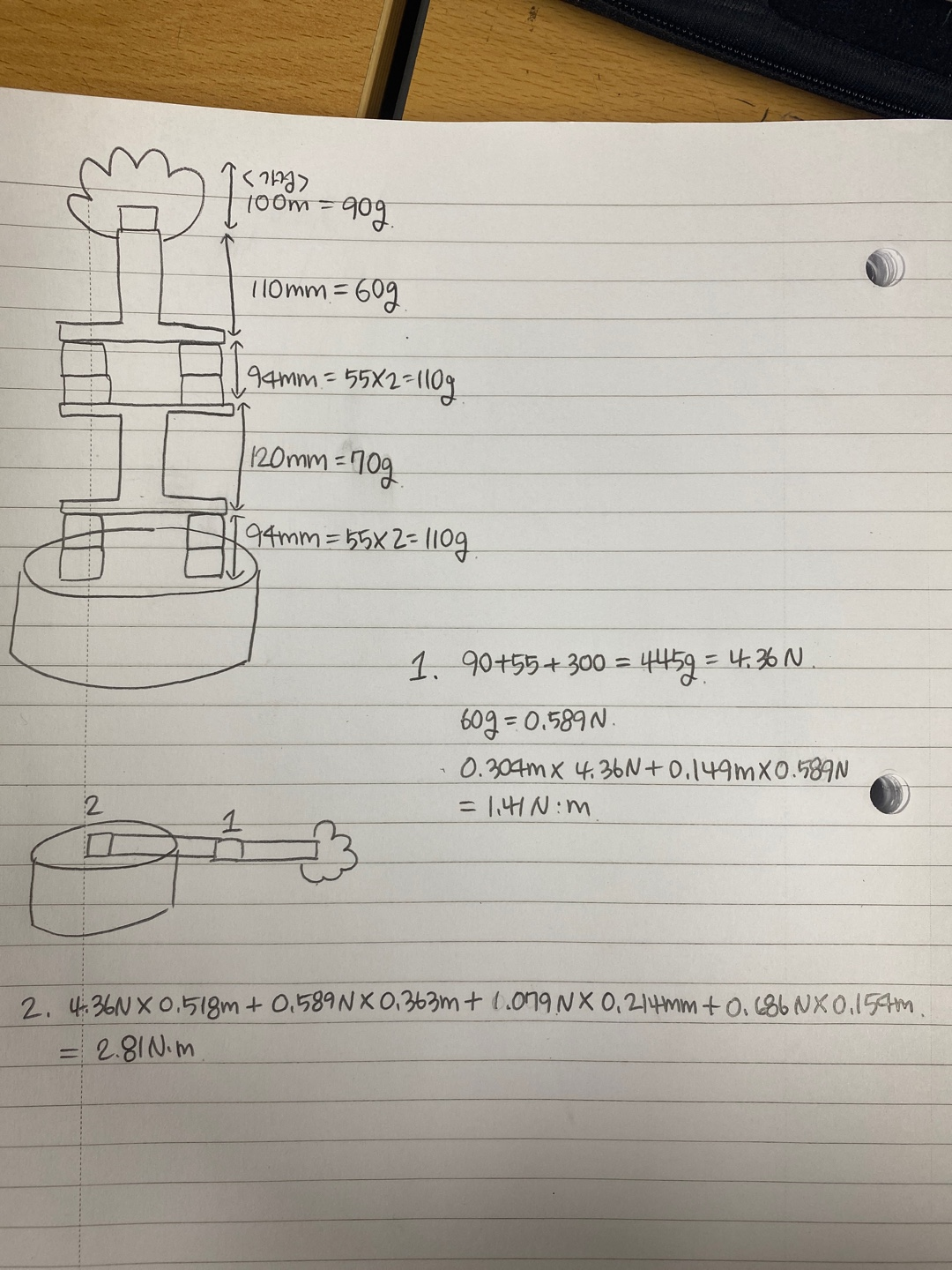
아 물론 계산은 엄청 오래 지나서 그때는 다 맞게 한거 같은데 지금은 기억이 안난다. 나중에 다시 풀어봐야지....
아무튼 이렇게 계산을 진행하고 치명적인 오류를 발견했다. 각 link에 모터가 2개씩 달려야 한다.
따라서 우리는 link1 과 link2 에 AX-12A 모터를 각 2개씩 달아서 gripper 까지 총 6개의 모터가 사용된다.
따라서 그리퍼를 제외한 manipulator의 전체 모델링은 아래그림과 같이 된다.

다음으로 그리퍼를 설계 해야 한다. 하지만 그리퍼를 처음부터 제작하기는 어려움이 있어서 오픈소스 gripper를 찾아보았다. 다양하게 찾아보았지만 일단 ax-12a와의 호환성이 좋고 설계가 쉬운 gripper를 우선으로 찾았다.




위의 그림에서 오른쪽하단의 gripper를 선택했고 다행이도 모델링 파일이 오픈소스로 존재해서
제작이 쉬울것 같앗다.

사진과 같이 gripper 제작을 진행했다. 아래 사진과 같이 전체 manipulator 설계가 끝났다.
그리고 중간에 manipulator의 작동 확인을 위해 ROBOTIS 사의 DYNAMIXEL wizard 소프트웨어를 이용해
manipulator의 간단한 구동을 진행했다. (동영상은 생략~)

정확한 정보 전달보단 공부 겸 기록에 초점을 둔 글입니다. 틀린 내용이 있을 수 있습니다.
틀린 내용이나 다른 문제가 있으면 댓글 남겨주시거나 또는 이메일로 보내주시면
감사하겠습니다.
'프로젝트 > 캡스톤 디자인' 카테고리의 다른 글
| 2023 캡스톤 디자인 (4-DOF Robot Arm)-4 (0) | 2024.01.06 |
|---|---|
| 2023 캡스톤 디자인 (4-DOF Robot Arm)-2 (0) | 2023.08.11 |
| 2023 캡스톤 디자인 (4-DOF Robot Arm)-1 (0) | 2023.08.09 |