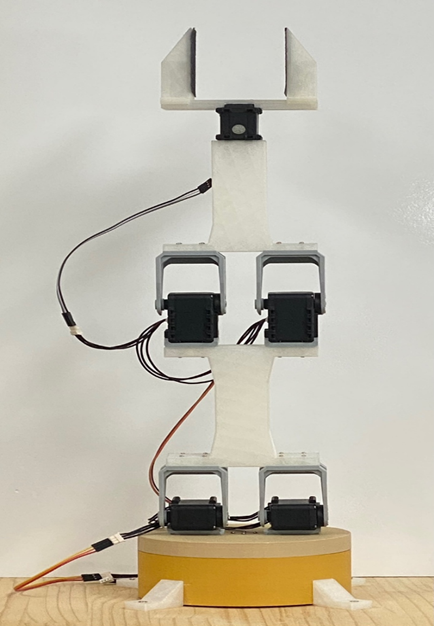
manipulator 설계를 끝내고 물품보관함, 쇼케이스와의 거리를 조정하고 manipulator에 대한 코딩을 진행해야한다. 그전에 쇼케이스와 물품보관함 사이의 거리를 파악하고 거리에 따라 manipulator가 움직일수 있도록 Inverse kinematics 계산을 진행했다. 아래의 논문을 참고해서 3차원을 2차원 평면으로 단순화 시켜서 계산을 진행했다. https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE06603273 비전문가를 위한 로봇 팔 역기구학의 해석 | DBpia 이경문, 이강희 | 한국컴퓨터정보학회 학술발표논문집 | 2014.7 www.dbpia.co.kr 아래의 그림과 같이 수식을 계산은 논문과 같이 Matlab을 이용해 진행을 했다..